[tta] 완전자율주행을 위한 C-V2X의 표준 및 미래 전망과 생태계
1. 머리말
- [jd
- [jd
스마트시티의 스마트 모빌리티나 스마트 공장의 AGV(Automated Guided Vehicle) 등의 분야에 직접 활용
- [jd
스마트시티의 스마트 모빌리티나 스마트 공장의 AGV(Automated Guided Vehicle) 등의 분야에 직접 활용
스마트시티의 스마트 모빌리티나 스마트 공장의 AGV(Automated Guided Vehicle) 등의 분야에 직접 활용
- [jd
완전자율주행의 기술은 UAM(Urban Areial Mobility)과 로봇 분야와도 밀접한 기술적 연관성을 갖는 등 후방 효과가 지대한 기술 분야
완전자율주행의 기술은 UAM(Urban Areial Mobility)과 로봇 분야와도 밀접한 기술적 연관성을 갖는 등 후방 효과가 지대한 기술 분야
- [jd
자율주행 활용에 대한 한 분석 자료에 의하면 2050년 세계 50대 혼잡한 도심에서 연간 2억 5000만 시간의 출퇴근 시간을 절약할 수 있으며, 이 막대한 시간의 시장규모는 2030억 달러에 이르러 기업들에게는 새로운 비즈니스 창출의 기회가 될 수 있다.
자율주행 활용에 대한 한 분석 자료에 의하면 2050년 세계 50대 혼잡한 도심에서 연간 2억 5000만 시간의 출퇴근 시간을 절약할 수 있으며, 이 막대한 시간의 시장규모는 2030억 달러에 이르러 기업들에게는 새로운 비즈니스 창출의 기회가 될 수 있다.
- [jd
자율주행을 위한 C-ITS 기술로 셀룰러 기반 차량·사물통신(C-V2X)과 근거리 전용 고속 패킷 통신 통신 시스템(DSRC) 방식이 경합하고 있다. 두 방식은 네트워크 구축 및 운용 방식의 차이가 있어, 어떤 기술을 선택하느냐에 따라 향후 미래지향적 완전자율주행 기술 개발에 광범위하고 지속적인 영향을 미칠 전망이다. 자동차 산업의 모바일화 추세를 생각하면, 이같은 네트워크 구축의 중요성은 더 커진다.
자율주행을 위한 C-ITS 기술로 셀룰러 기반 차량·사물통신(C-V2X)과 근거리 전용 고속 패킷 통신 통신 시스템(DSRC) 방식이 경합하고 있다. 두 방식은 네트워크 구축 및 운용 방식의 차이가 있어, 어떤 기술을 선택하느냐에 따라 향후 미래지향적 완전자율주행 기술 개발에 광범위하고 지속적인 영향을 미칠 전망이다. 자동차 산업의 모바일화 추세를 생각하면, 이같은 네트워크 구축의 중요성은 더 커진다.
- [jd
모빌리티 혁명을 위한 필수 전제조건은 SDV(Software Defined Vehicle), 즉 소프트웨어에 의하여 자동차의 하드웨어 기능을 포함한 자율주행 및 인포테인먼트의 거의 모든 성능을 향상시키고 운전자의 주행 특성과도 결합될 수 있는 형태의 자동차이다.
모빌리티 혁명을 위한 필수 전제조건은 SDV(Software Defined Vehicle), 즉 소프트웨어에 의하여 자동차의 하드웨어 기능을 포함한 자율주행 및 인포테인먼트의 거의 모든 성능을 향상시키고 운전자의 주행 특성과도 결합될 수 있는 형태의 자동차이다.
- [jd
스마트폰이 OTA(Over The Air) 방식으로 SW나 App을 업데이트하듯 자동차 소프트웨어도 무선 업데이트 되어야 한다는 것이다. 머지않은 미래에 (자율주행) 차량들은 모바일 네트워크의 하나의 노드 역할을 하게 되고, 모빌리티 생태계는 모바일 생태계 안에 존재하게 될 것이다.
스마트폰이 OTA(Over The Air) 방식으로 SW나 App을 업데이트하듯 자동차 소프트웨어도 무선 업데이트 되어야 한다는 것이다. 머지않은 미래에 (자율주행) 차량들은 모바일 네트워크의 하나의 노드 역할을 하게 되고, 모빌리티 생태계는 모바일 생태계 안에 존재하게 될 것이다.
2. 자율주행 자동차
- [jd
- [jd
자율주행자동차란 운전자 또는 승객의 조작 없이 자동차 스스로 운행이 가능한 자동차
- [jd
자율주행자동차란 운전자 또는 승객의 조작 없이 자동차 스스로 운행이 가능한 자동차
자율주행자동차란 운전자 또는 승객의 조작 없이 자동차 스스로 운행이 가능한 자동차
- [jd
- [jd
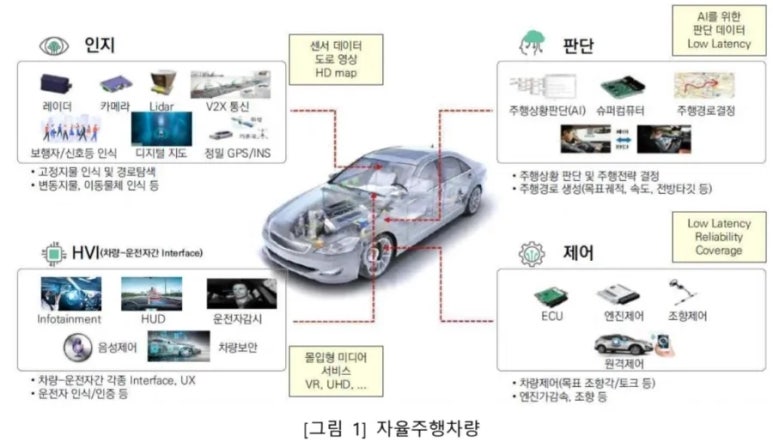
자율주행차는 기술적으로 크게 주행환경, 위치 등을 인식하는 인지, 주행상황 판단 및 경로 생성을 위한 판단, 가감속과 조향 등을 담당하는 제어 등 세 분야의 기술을 필요로한다.
- [jd
자율주행차는 기술적으로 크게 주행환경, 위치 등을 인식하는 인지, 주행상황 판단 및 경로 생성을 위한 판단, 가감속과 조향 등을 담당하는 제어 등 세 분야의 기술을 필요로한다.
자율주행차는 기술적으로 크게 주행환경, 위치 등을 인식하는 인지, 주행상황 판단 및 경로 생성을 위한 판단, 가감속과 조향 등을 담당하는 제어 등 세 분야의 기술을 필요로한다.
- [jd
운전자가 인간인 경우 자동차와 운전자간 소통을 위한 HVI 기술도 필요
운전자가 인간인 경우 자동차와 운전자간 소통을 위한 HVI 기술도 필요
- [jd
- [jd
인지는 카메라를 포함한 각종 센서를 비롯해 정밀지도, 차량 간 통신 등 복합적인 경로를 통해 주변 환경을 인식하는 것이다.
- [jd
인지는 카메라를 포함한 각종 센서를 비롯해 정밀지도, 차량 간 통신 등 복합적인 경로를 통해 주변 환경을 인식하는 것이다.
인지는 카메라를 포함한 각종 센서를 비롯해 정밀지도, 차량 간 통신 등 복합적인 경로를 통해 주변 환경을 인식하는 것이다.
- [jd
- [jd
차량에 장착되는 센서는 레이더, 라이다, 카메라, GPS 및 초3음파 센서 등 다양하며, 이들로부터 수집된 데이터를 가공/분석하여 주변 환경을 인식한다
- [jd
차량에 장착되는 센서는 레이더, 라이다, 카메라, GPS 및 초3음파 센서 등 다양하며, 이들로부터 수집된 데이터를 가공/분석하여 주변 환경을 인식한다
차량에 장착되는 센서는 레이더, 라이다, 카메라, GPS 및 초3음파 센서 등 다양하며, 이들로부터 수집된 데이터를 가공/분석하여 주변 환경을 인식한다
- [jd
2020년 말에야 탐지거리 300m 정도의 레이더/라이더 제품군이 상용화되기 시작했고, 현재 상용화된 센서들의 탐지거리는 대부분 100m 정도라 stand-alone 방식의 자율주행만 가능하다.
2020년 말에야 탐지거리 300m 정도의 레이더/라이더 제품군이 상용화되기 시작했고, 현재 상용화된 센서들의 탐지거리는 대부분 100m 정도라 stand-alone 방식의 자율주행만 가능하다.
- [jd
따라서 주변 차량의 경로 예측, 사각지대 관측 등과 같은 상황인지가 어려워 즉각적인 비상 대처만 가능하다.
따라서 주변 차량의 경로 예측, 사각지대 관측 등과 같은 상황인지가 어려워 즉각적인 비상 대처만 가능하다.
- [jd
- [jd
하지만, V2X 통신기능을 탑재한 자율자동차는 주변 차량 및 신호등에 설치된 단말 및 RSU, 주변 기지국 및 보행자들과 실시간으로 유용한 정보를 송수신하여 connected 자율주행을 수행함으로써 단기적인 상황 대응뿐만 아니라 장기적인 운행 예측/지원을 가능하게 한다.
- [jd
하지만, V2X 통신기능을 탑재한 자율자동차는 주변 차량 및 신호등에 설치된 단말 및 RSU, 주변 기지국 및 보행자들과 실시간으로 유용한 정보를 송수신하여 connected 자율주행을 수행함으로써 단기적인 상황 대응뿐만 아니라 장기적인 운행 예측/지원을 가능하게 한다.
하지만, V2X 통신기능을 탑재한 자율자동차는 주변 차량 및 신호등에 설치된 단말 및 RSU, 주변 기지국 및 보행자들과 실시간으로 유용한 정보를 송수신하여 connected 자율주행을 수행함으로써 단기적인 상황 대응뿐만 아니라 장기적인 운행 예측/지원을 가능하게 한다.
- [jd
이는 교통사고 감소와 교통효율 증가로 이어져 자율자동차의 사회/경제적 이점을 극대화한다
이는 교통사고 감소와 교통효율 증가로 이어져 자율자동차의 사회/경제적 이점을 극대화한다
- [jd
- [jd
판단은 인간의 두뇌에 비유할 수 있다. 통합제어시스템(ECU) 등을 통해 신호를 처리하거나 주변 상황에 따라 생성되는 수많은 솔루션 가운데 최적의 차량 경로와 움직임을 결정한다.
- [jd
판단은 인간의 두뇌에 비유할 수 있다. 통합제어시스템(ECU) 등을 통해 신호를 처리하거나 주변 상황에 따라 생성되는 수많은 솔루션 가운데 최적의 차량 경로와 움직임을 결정한다.
판단은 인간의 두뇌에 비유할 수 있다. 통합제어시스템(ECU) 등을 통해 신호를 처리하거나 주변 상황에 따라 생성되는 수많은 솔루션 가운데 최적의 차량 경로와 움직임을 결정한다.
- [jd
- [jd
최근 자율주행차량에 탑재되는 인공지능(머신러닝 또는 딥러닝)이 특정 사물을 파악하는 원리를 스스로 학습하는 기술로 활용되고 있으며, 자율주행차량은 이를 통해 사물을 단순 인식하는 수준을 넘어 사물의 의미를 이해하고 보행자의 다양한 형태와 움직임을 분류/파악하며, 차량의 수준을 넘어 사물의 의미를 이해하고 보행자의 다양한 형태와 움직임을 분류/파악하며, 차량의 진행 방향, 차도와 인도를 구분하는 등 높은 수준의 판단 능력을 갖게 된다.
- [jd
최근 자율주행차량에 탑재되는 인공지능(머신러닝 또는 딥러닝)이 특정 사물을 파악하는 원리를 스스로 학습하는 기술로 활용되고 있으며, 자율주행차량은 이를 통해 사물을 단순 인식하는 수준을 넘어 사물의 의미를 이해하고 보행자의 다양한 형태와 움직임을 분류/파악하며, 차량의 수준을 넘어 사물의 의미를 이해하고 보행자의 다양한 형태와 움직임을 분류/파악하며, 차량의 진행 방향, 차도와 인도를 구분하는 등 높은 수준의 판단 능력을 갖게 된다.
최근 자율주행차량에 탑재되는 인공지능(머신러닝 또는 딥러닝)이 특정 사물을 파악하는 원리를 스스로 학습하는 기술로 활용되고 있으며, 자율주행차량은 이를 통해 사물을 단순 인식하는 수준을 넘어 사물의 의미를 이해하고 보행자의 다양한 형태와 움직임을 분류/파악하며, 차량의 수준을 넘어 사물의 의미를 이해하고 보행자의 다양한 형태와 움직임을 분류/파악하며, 차량의 진행 방향, 차도와 인도를 구분하는 등 높은 수준의 판단 능력을 갖게 된다.
- [jd
자율주행 기능의 완성도를 높이기 위해서는 많은 양의 해당 차량 주행 데이터 또는 다른 차량의 주행 데이터를 바탕으로 운전 방법을 훈련시켜 학습할 수 있게 하여야 한다.
자율주행 기능의 완성도를 높이기 위해서는 많은 양의 해당 차량 주행 데이터 또는 다른 차량의 주행 데이터를 바탕으로 운전 방법을 훈련시켜 학습할 수 있게 하여야 한다.
- [jd
- [jd
제어는 인지 정보를 바탕으로 내려진 판단 결정을 실제로 구현하는 기술로, 각 구동계의 actuator를 통해 속도를 조절하거나 방향 제어, 제동 등으로 자율자동차의 직접적인 움직임을 관할한다.
- [jd
제어는 인지 정보를 바탕으로 내려진 판단 결정을 실제로 구현하는 기술로, 각 구동계의 actuator를 통해 속도를 조절하거나 방향 제어, 제동 등으로 자율자동차의 직접적인 움직임을 관할한다.
제어는 인지 정보를 바탕으로 내려진 판단 결정을 실제로 구현하는 기술로, 각 구동계의 actuator를 통해 속도를 조절하거나 방향 제어, 제동 등으로 자율자동차의 직접적인 움직임을 관할한다.
3. C-ITS와 자율주행
- [jd
- [jd
C-ITS는 ITS(Intelligent Transport System)의 발전된 형태다.
- [jd
C-ITS는 ITS(Intelligent Transport System)의 발전된 형태다.
C-ITS는 ITS(Intelligent Transport System)의 발전된 형태다.
- [jd
- [jd
ITS가 기술을 활용하여 도로와 차량의 안전과 편의를 향상시키는 것에 주안점을 두었다면,
- [jd
ITS가 기술을 활용하여 도로와 차량의 안전과 편의를 향상시키는 것에 주안점을 두었다면,
ITS가 기술을 활용하여 도로와 차량의 안전과 편의를 향상시키는 것에 주안점을 두었다면,
- [jd
C-ITS는 차량, 보행자, 도로 인프라 등 도로의 구성 요소들이 통신을 통해 정보를 교환하고, 이를 바탕으로 도로와 차량의 안전과 편의 향상을 목적으로 한다는 차이가 있다.
C-ITS는 차량, 보행자, 도로 인프라 등 도로의 구성 요소들이 통신을 통해 정보를 교환하고, 이를 바탕으로 도로와 차량의 안전과 편의 향상을 목적으로 한다는 차이가 있다.
- [jd
C-ITS는 자율주행 단계3에서의 안전성 강화뿐만 아니라, 완전자율주행 수준인 단계4/5로 도약 발전하기 위한 핵심 기술로서 교통 정보를 효과적으로 교환하고 공유하며 이를 수집, 관리, 통제하는 역할을 수행한다. 이러한 발전에는 통신이 필수적으로 사용된다.
C-ITS는 자율주행 단계3에서의 안전성 강화뿐만 아니라, 완전자율주행 수준인 단계4/5로 도약 발전하기 위한 핵심 기술로서 교통 정보를 효과적으로 교환하고 공유하며 이를 수집, 관리, 통제하는 역할을 수행한다. 이러한 발전에는 통신이 필수적으로 사용된다.
- [jd
카메라, 레이다, 라이다를 포함한 다양한 센서 데이터를 이용하고 차량 간 공유를 통해 안전과 효율을 향상시키는 서비스, 동적 고해상도 3D 지도를 구축하기 위한 데이터의 공유, 군집 주행과 원격 운전 등에서 C-V2X 기술은 중추적인 역할을 한다
카메라, 레이다, 라이다를 포함한 다양한 센서 데이터를 이용하고 차량 간 공유를 통해 안전과 효율을 향상시키는 서비스, 동적 고해상도 3D 지도를 구축하기 위한 데이터의 공유, 군집 주행과 원격 운전 등에서 C-V2X 기술은 중추적인 역할을 한다
- [jd
- [jd
미국은 C-ITS 용도로 이동통신 프로토콜을 사용하는 C-V2X 기술 중 LTE-V2X에 75MHz ITS 주파수 중 상위 30MHz를 할당, 자국 V2X 통신 기술로 C-V2X를 사용할 것을 2021년 11월 18일 FCC 위원회 표결에서 만장일치로 확정하였다. 이에 따른 행정명령이 시행될 예정
- [jd
미국은 C-ITS 용도로 이동통신 프로토콜을 사용하는 C-V2X 기술 중 LTE-V2X에 75MHz ITS 주파수 중 상위 30MHz를 할당, 자국 V2X 통신 기술로 C-V2X를 사용할 것을 2021년 11월 18일 FCC 위원회 표결에서 만장일치로 확정하였다. 이에 따른 행정명령이 시행될 예정
미국은 C-ITS 용도로 이동통신 프로토콜을 사용하는 C-V2X 기술 중 LTE-V2X에 75MHz ITS 주파수 중 상위 30MHz를 할당, 자국 V2X 통신 기술로 C-V2X를 사용할 것을 2021년 11월 18일 FCC 위원회 표결에서 만장일치로 확정하였다. 이에 따른 행정명령이 시행될 예정
- [jd
중국은 2018년 11월부터 C-V2X 실증사업, 자율자동차 개발 등의 상용화를 진행하고 있으며, 2020년 12월 중국의 대표적 차량제조사인 홍치 플래그쉽 스마트 전기차 SUV E-HS9에 Qualcomm LTE-V2X 칩셋을 내장하여 C-V2X 기술의 본격적인 상용화를 시작
중국은 2018년 11월부터 C-V2X 실증사업, 자율자동차 개발 등의 상용화를 진행하고 있으며, 2020년 12월 중국의 대표적 차량제조사인 홍치 플래그쉽 스마트 전기차 SUV E-HS9에 Qualcomm LTE-V2X 칩셋을 내장하여 C-V2X 기술의 본격적인 상용화를 시작
- [jd
우리나라는 2016년 ITS 주파수 대역 70MHz를 기술 중립으로 공시하였으나, 2018년부터 국토교통부가 지원하는 지자체 실증사업에서는 DSRC만을 채택하고 있어, C-V2X 대규모 실증 기회가 원천 봉쇄되고 있는 실정
우리나라는 2016년 ITS 주파수 대역 70MHz를 기술 중립으로 공시하였으나, 2018년부터 국토교통부가 지원하는 지자체 실증사업에서는 DSRC만을 채택하고 있어, C-V2X 대규모 실증 기회가 원천 봉쇄되고 있는 실정
- [jd
- [jd
최종적으로는 2022년까지 1년여간 LTEV2X 실도로 실증 후, 2023년 까지 LTE-V2X와 DSRC 두 가지 통신방식의 RSU를 일부 고속도로 구간에 구축하고, 2024년부터 단일 V2X 통신방식을 선정하여 전 국토 도로에 V2X를 구축 및 운용하기로 결정
- [jd
최종적으로는 2022년까지 1년여간 LTEV2X 실도로 실증 후, 2023년 까지 LTE-V2X와 DSRC 두 가지 통신방식의 RSU를 일부 고속도로 구간에 구축하고, 2024년부터 단일 V2X 통신방식을 선정하여 전 국토 도로에 V2X를 구축 및 운용하기로 결정
최종적으로는 2022년까지 1년여간 LTEV2X 실도로 실증 후, 2023년 까지 LTE-V2X와 DSRC 두 가지 통신방식의 RSU를 일부 고속도로 구간에 구축하고, 2024년부터 단일 V2X 통신방식을 선정하여 전 국토 도로에 V2X를 구축 및 운용하기로 결정
- [jd
- [jd
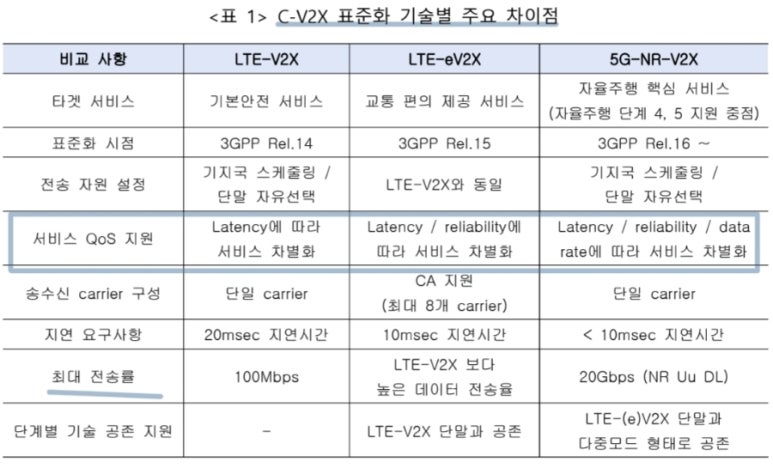
C-V2X 기술은 DSRC 기술 대비, 데이터 전송율, 신뢰도, 지연시간, 이동성 지원, 유효통신 거리, V2N 적용, 혼잡 차량 트래픽 대응, 인접채널간섭 등 거의 모든 측면에서 우위에 있다.
- [jd
C-V2X 기술은 DSRC 기술 대비, 데이터 전송율, 신뢰도, 지연시간, 이동성 지원, 유효통신 거리, V2N 적용, 혼잡 차량 트래픽 대응, 인접채널간섭 등 거의 모든 측면에서 우위에 있다.
C-V2X 기술은 DSRC 기술 대비, 데이터 전송율, 신뢰도, 지연시간, 이동성 지원, 유효통신 거리, V2N 적용, 혼잡 차량 트래픽 대응, 인접채널간섭 등 거의 모든 측면에서 우위에 있다.
- [jd
C-V2X 기술에서 적은 데이터 량을 필요로 하는 안전서비스는 LTE-(e)V2X 기술로, 대용량 데이터가 요구되는 고도화된 자율주행 서비스는 5G NR-V2X 기술로 지원할 수 있도록 성능 요구 사항 및 기술표준이 준비되어 있다.
C-V2X 기술에서 적은 데이터 량을 필요로 하는 안전서비스는 LTE-(e)V2X 기술로, 대용량 데이터가 요구되는 고도화된 자율주행 서비스는 5G NR-V2X 기술로 지원할 수 있도록 성능 요구 사항 및 기술표준이 준비되어 있다.
- [jd
LTE-(e)V2X와 5G-NR-V2X 기술은 현재 우리가 사용하는 스마트폰이 동시에 3G와 4G, 5G 기술을 사용할 수 있도록 되어 있듯이, 차량에 멀티모드 탑재가 예상된다
LTE-(e)V2X와 5G-NR-V2X 기술은 현재 우리가 사용하는 스마트폰이 동시에 3G와 4G, 5G 기술을 사용할 수 있도록 되어 있듯이, 차량에 멀티모드 탑재가 예상된다
- [jd
자율주행차량의 상용화를 위해서는 자율주행 지원이나 안전향상 서비스뿐만 아니라 기본 안전서비스도 필요하므로 LTE-V2X와 5G-NRV2X가 모두 활용되고, 동시 통신이 가능해야 한다.
자율주행차량의 상용화를 위해서는 자율주행 지원이나 안전향상 서비스뿐만 아니라 기본 안전서비스도 필요하므로 LTE-V2X와 5G-NRV2X가 모두 활용되고, 동시 통신이 가능해야 한다.
- [jd
5G-NR-V2X로만 기본 안전 서비스를 제공하는 경우, 기존 비자율주행차량과 자율주행차량 간 기본 안전 서비스 지원에 문제가 발생하므로, LTE-V2X를 통한 기본 안전서비스 제공은 자율주행차량의 통신모듈에 있어서도 반드시 포함되어야 하는 기능이다
5G-NR-V2X로만 기본 안전 서비스를 제공하는 경우, 기존 비자율주행차량과 자율주행차량 간 기본 안전 서비스 지원에 문제가 발생하므로, LTE-V2X를 통한 기본 안전서비스 제공은 자율주행차량의 통신모듈에 있어서도 반드시 포함되어야 하는 기능이다
4. C-V2X 기술의 단계별 진화
1) LTE-V2X
- [jd
- [jd
C-ITS 서비스 지원을 위한 LTE-V2X 기술은 Uu 인터페이스 및 PC5 인터페이스를 통해서 V2X 서비스 메시지를 송수신하는 방안을 정의
- [jd
C-ITS 서비스 지원을 위한 LTE-V2X 기술은 Uu 인터페이스 및 PC5 인터페이스를 통해서 V2X 서비스 메시지를 송수신하는 방안을 정의
C-ITS 서비스 지원을 위한 LTE-V2X 기술은 Uu 인터페이스 및 PC5 인터페이스를 통해서 V2X 서비스 메시지를 송수신하는 방안을 정의
- [jd
- [jd
Uu 인터페이스는 V2X 서비스를 지원하기 위해 상향링크 SPS(Semi Persistence Scheduling) 세션(논리 채널) 동시 설정을 8개까지 활성화할 수 있다.
- [jd
Uu 인터페이스는 V2X 서비스를 지원하기 위해 상향링크 SPS(Semi Persistence Scheduling) 세션(논리 채널) 동시 설정을 8개까지 활성화할 수 있다.
Uu 인터페이스는 V2X 서비스를 지원하기 위해 상향링크 SPS(Semi Persistence Scheduling) 세션(논리 채널) 동시 설정을 8개까지 활성화할 수 있다.
- [jd
eMBMS(evolved Multimedia Broadcast Multicast Services) 및 SC-PTM (SingleCellPointToMultipoint)에서 V2X 지원을 위한 짧은 주기 스케줄링 기능을 추가하고, 유니캐스트 및 브로드캐스트 전송을 지원할 때 50㎧ 지연시간, 최소 99% 전송 신뢰도를 요구하는 QCI 값을 V2X 서비스에 사용할 수 있도록 정의되어 있다.
eMBMS(evolved Multimedia Broadcast Multicast Services) 및 SC-PTM (SingleCellPointToMultipoint)에서 V2X 지원을 위한 짧은 주기 스케줄링 기능을 추가하고, 유니캐스트 및 브로드캐스트 전송을 지원할 때 50㎧ 지연시간, 최소 99% 전송 신뢰도를 요구하는 QCI 값을 V2X 서비스에 사용할 수 있도록 정의되어 있다.
- [jd
PC5 프로토콜에서는 고속 이동성 지원을 위한 참조신호(DMRS) 패턴 설계, 2가지 전송 자원 선택 모드(Mode 3, 4), 패킷우선전송 지원 및 채널 혼잡제어 기법, 타 사업자 기지국 및 단말로부터의 V2X 서비스 수신 기능 등 통신을 지원하기 위한 기능들이 정의되었다.
PC5 프로토콜에서는 고속 이동성 지원을 위한 참조신호(DMRS) 패턴 설계, 2가지 전송 자원 선택 모드(Mode 3, 4), 패킷우선전송 지원 및 채널 혼잡제어 기법, 타 사업자 기지국 및 단말로부터의 V2X 서비스 수신 기능 등 통신을 지원하기 위한 기능들이 정의되었다.
2) LTE-eV2X
- [jd
- [jd
LTE-eV2X 시스템은 LTE-V2X 통신 프로토콜을 기본적으로 지원하며, Advanced V2X Use Case를 지원하기 위한 추가 기능을 정의
- [jd
LTE-eV2X 시스템은 LTE-V2X 통신 프로토콜을 기본적으로 지원하며, Advanced V2X Use Case를 지원하기 위한 추가 기능을 정의
LTE-eV2X 시스템은 LTE-V2X 통신 프로토콜을 기본적으로 지원하며, Advanced V2X Use Case를 지원하기 위한 추가 기능을 정의
3) 5G-NR-V2X
- [jd
- [jd
NR-V2 X 시스템은 유니캐스트, 그룹캐스트와 같은 다양한 통신모드 지원, 피드백 기반 패킷 재전송을 통한 통신 신뢰성 향상 기능, 256QAM 변조방식 및 4 0MHz 채널대역폭 지원을 통한 데이터 전송율 향상에 의해 자율주행 등의 고도화된 서비스 성능 요구사항을 지원하기 위한 기능들이 정의
- [jd
NR-V2 X 시스템은 유니캐스트, 그룹캐스트와 같은 다양한 통신모드 지원, 피드백 기반 패킷 재전송을 통한 통신 신뢰성 향상 기능, 256QAM 변조방식 및 4 0MHz 채널대역폭 지원을 통한 데이터 전송율 향상에 의해 자율주행 등의 고도화된 서비스 성능 요구사항을 지원하기 위한 기능들이 정의
NR-V2 X 시스템은 유니캐스트, 그룹캐스트와 같은 다양한 통신모드 지원, 피드백 기반 패킷 재전송을 통한 통신 신뢰성 향상 기능, 256QAM 변조방식 및 4 0MHz 채널대역폭 지원을 통한 데이터 전송율 향상에 의해 자율주행 등의 고도화된 서비스 성능 요구사항을 지원하기 위한 기능들이 정의
5. 미래 모빌리티 산업의 방향성
- [jd
- [jd
모빌리티 혁명을 위한 필수 전제조건은 SDV(Software Defined Vehicle)
- [jd
모빌리티 혁명을 위한 필수 전제조건은 SDV(Software Defined Vehicle)
모빌리티 혁명을 위한 필수 전제조건은 SDV(Software Defined Vehicle)
- [jd
- [jd
소프트웨어에 의하여 자동차의 하드웨어 기능을 포함한 자율주행 및 인포테인먼트의 거의 모든 성능을 향상시키고 운전자의 주행특성과도 결합될 수 있는 형태의 자동차
- [jd
소프트웨어에 의하여 자동차의 하드웨어 기능을 포함한 자율주행 및 인포테인먼트의 거의 모든 성능을 향상시키고 운전자의 주행특성과도 결합될 수 있는 형태의 자동차
소프트웨어에 의하여 자동차의 하드웨어 기능을 포함한 자율주행 및 인포테인먼트의 거의 모든 성능을 향상시키고 운전자의 주행특성과도 결합될 수 있는 형태의 자동차
- [jd
자동차의 성능을 좌우하는 소프트웨어 역시 OTA로 무선 업데이트 되어야 한다
자동차의 성능을 좌우하는 소프트웨어 역시 OTA로 무선 업데이트 되어야 한다
- [jd
- [jd
OTA로 동작/제어되는 SDV를 위하여는 중앙에서 차량의 기능을 통합제어하여 효율을 극대화하는 구조가 필요
- [jd
OTA로 동작/제어되는 SDV를 위하여는 중앙에서 차량의 기능을 통합제어하여 효율을 극대화하는 구조가 필요
OTA로 동작/제어되는 SDV를 위하여는 중앙에서 차량의 기능을 통합제어하여 효율을 극대화하는 구조가 필요
- [jd
이미 모바일 생태계를 장악한 기업이 모빌리티 산업의 주도권을 장악할 가능성이 더 크다
이미 모바일 생태계를 장악한 기업이 모빌리티 산업의 주도권을 장악할 가능성이 더 크다
- [jd
작년 세계에서 자율주행 테스트 거리가 가장 길었던 회사는 GM과 구글의 자율주행 전문회사인 크루즈와 웨이모로서 각각 124만㎞와 101만㎞였다. 이들은 별도의 비용이 드는 시험차량을 사용해야 하나, 테슬라의 경우에는 이미 세계적으로 상용화 된 150만대 이상의 자사 차량을 통하여 수집된 양질의 대규모 데이터로 AI 기반자율주행 알고리즘을 학습시킨다는 것
작년 세계에서 자율주행 테스트 거리가 가장 길었던 회사는 GM과 구글의 자율주행 전문회사인 크루즈와 웨이모로서 각각 124만㎞와 101만㎞였다. 이들은 별도의 비용이 드는 시험차량을 사용해야 하나, 테슬라의 경우에는 이미 세계적으로 상용화 된 150만대 이상의 자사 차량을 통하여 수집된 양질의 대규모 데이터로 AI 기반자율주행 알고리즘을 학습시킨다는 것
6. 맺음말
- [jd
- [jd
C-V2X 기술은 Rel.16 5G-NR-V2X 기술 이후로도 차량 간 정밀 측위, 확장된 주파수 지원 등의 지속적인 진화가 예정되어 있다.
- [jd
C-V2X 기술은 Rel.16 5G-NR-V2X 기술 이후로도 차량 간 정밀 측위, 확장된 주파수 지원 등의 지속적인 진화가 예정되어 있다.
C-V2X 기술은 Rel.16 5G-NR-V2X 기술 이후로도 차량 간 정밀 측위, 확장된 주파수 지원 등의 지속적인 진화가 예정되어 있다.
- [jd
국내 교통사고 사망자의 약 40%가 보행자라는 점을 고려할 때, C-ITS 안전 서비스는 이동통신 기술을 채택하고 있는 휴대용 스마트 기기와의 연결성 보장이 필수적이다.
국내 교통사고 사망자의 약 40%가 보행자라는 점을 고려할 때, C-ITS 안전 서비스는 이동통신 기술을 채택하고 있는 휴대용 스마트 기기와의 연결성 보장이 필수적이다.
- [jd
C-V2X 기술은 차량과 휴대용 스마트 기기 간 통신 지원을 통한 서비스 확장성 측면에서도 독보적이라는 장점이 있다
C-V2X 기술은 차량과 휴대용 스마트 기기 간 통신 지원을 통한 서비스 확장성 측면에서도 독보적이라는 장점이 있다
- [jd
대규모 실증사업은 C-V2X 통신 링크 상의 데이터를 활용하여 교통사고를 감소시키고 교통 효율을 증가시켜 사회경제적인 효과를 최대화 할 수 있도록 추진되어야 할 것이며, 기술, 서비스, 인증 각 분야별 다양한 실증을 추진하는 것이 바람직하다.
대규모 실증사업은 C-V2X 통신 링크 상의 데이터를 활용하여 교통사고를 감소시키고 교통 효율을 증가시켜 사회경제적인 효과를 최대화 할 수 있도록 추진되어야 할 것이며, 기술, 서비스, 인증 각 분야별 다양한 실증을 추진하는 것이 바람직하다.
- [jd
자율주행을 위한 C-V2X 또는 DSRC 방식의 선정은 단순히 V2X 통신방식 선정의 문제가 아니며, 완전자율주행 기술 개발에 광범위하고 지속적인 영향을 미치는 지극히 중대한 결정사항이다. 아무쪼록 C-ITS 통신 기술 방식의 최종 선정이 우리 대한민국의 앞으로의 100년 대계를 염두에 두고 결정되었으면 하는 바람이다.
자율주행을 위한 C-V2X 또는 DSRC 방식의 선정은 단순히 V2X 통신방식 선정의 문제가 아니며, 완전자율주행 기술 개발에 광범위하고 지속적인 영향을 미치는 지극히 중대한 결정사항이다. 아무쪼록 C-ITS 통신 기술 방식의 최종 선정이 우리 대한민국의 앞으로의 100년 대계를 염두에 두고 결정되었으면 하는 바람이다.
#tta #C_V2X
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd
- [jd