C-V2X 시나리오 시뮬레이션 R&S CMW500 광대역 사용 무선통신 테스터-2
4 V2X 가상 테스트 시나리오 생성
4.1 시나리오 정의 – 교차로 충돌 경고 예
교차로 충돌 경고(ICW)는 호스트 차량(HV)이 교차로에 접근 중이고 원격 차량(RV)과 충돌할 위험이 있음을 의미합니다.
ICW 응용 프로그램은 HV의 운전자에게 경고합니다. 이 응용 프로그램은 도시 및 교외 지역의 일반 도로 및 고속도로 교차로, 순환 도로 입구, 고속도로 및 기타 교차로 입구에서 충돌 위험 경고에 적용할 수 있습니다.
4.2 시나리오 설명 - 교차로 충돌 경고
교차로 충돌 경고는 주로 교차로의 왼쪽 또는 오른쪽 영역에 있는 차량에 대한 경고를 포함합니다(그림 8). HV는 시동과 주행의 두 가지 상태를 가질 수 있으므로 4개 이상의 시나리오로 구성될 수 있습니다.
여기에서 설명하기 위해 RV(교차로 왼쪽) 및 HV(교차로에서 시작) 시나리오가 선택됩니다.
► HV는 교차로에서 정지하고 RV-1은 HV의 왼쪽에서 교차로까지 주행하며 교차로에서 정지한 RV-2에 의해 HV의 시야가 차단될 수 있습니다.
► HV 및 RV-1에는 CV2X 무선 통신 기능이 있어야 합니다. RV-2에 CV2X 무선 통신 기능이 있는지 여부는 장면의 효율성에 영향을 미치지 않습니다.
► HV가 교차로에 진입하기 시작하면 ICW 애플리케이션은 HV 운전자에게 조기 경고를 보내 운전자에게 다가오는 측면 차량 RV-1과의 충돌 위험을 상기시킵니다.
► 경고 시간은 HV 운전자가 경고를 받은 후 RV-1과의 충돌을 피할 수 있는 충분한 시간을 보장해야 합니다.
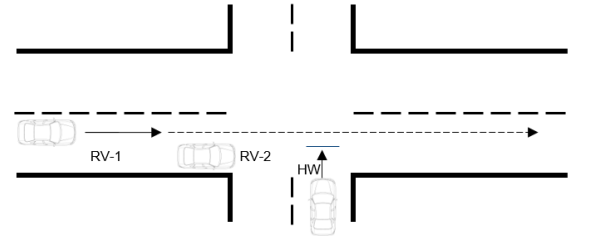
그림 8: 시나리오 설명
4.3 시나리오 생성 - CANoe(Car2x 시나리오 편집기)
► CANoe 사용자 매뉴얼에 설명된 대로 Vector CANoe 소프트웨어를 설치합니다.
► 빠른 램프업을 위해 기본 구성을 다운로드합니다. 구성에는 CMW500 및 CANoe .Car2x를 연결하기 위한 기본 모듈이 포함됩니다.
https://kb.vector.com/entry/1648/
► 구성 설정 방법을 보여주는 데모 예제가 이미 배송에 포함되어 있습니다.
► CANoe의 온라인 도움말은 기능 사용 방법에 대한 세부 정보를 제공합니다.
► CANoe 소프트웨어를 사용하여 CANoe 프로젝트를 열고 도구 도구 모음에서 Car2x 시나리오 편집기 도구를 엽니다(그림 9).
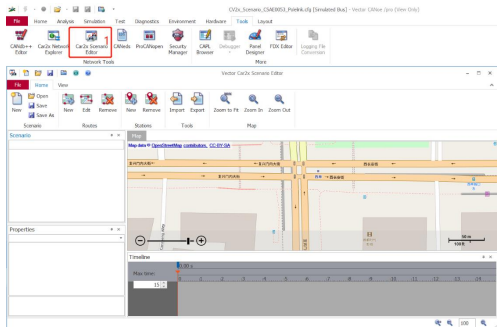
그림 9: Car2x 시나리오 편집기
► 지도의 크기를 조정하고 적절한 교차로를 선택하고 New Routes(새 경로)를 클릭하고 2개의 교통 경로를 추가합니다(그림 10).
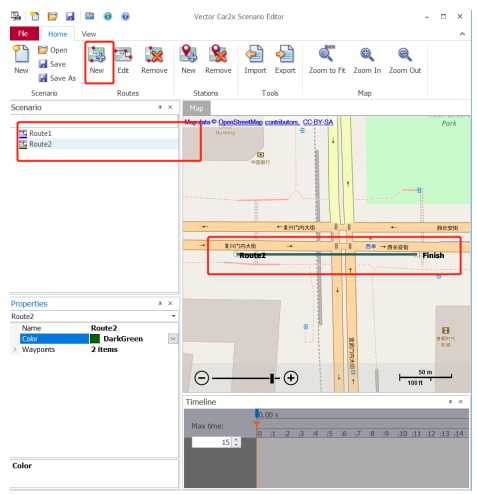
그림 10 : 새 경로 추가
► 후속 시뮬레이션을 위해 장면 파일을 저장합니다. ICW 시나리오 파일(ICW Scenario(Temp).scn)은
이 애플리케이션 노트에 첨부되어 있습니다.
► CSAE53의 다른 시나리오에 대해서는 이 가이드를 참조하거나 R&S 파트너인 Shanghai Polelink co., LTD에 문의하십시오. 동시에 Polelink
는 CarMaker + CANoe + R&S 기기를 기반으로 3D V2X 시나리오 시뮬레이션 컨설팅 서비스를 제공합니다.
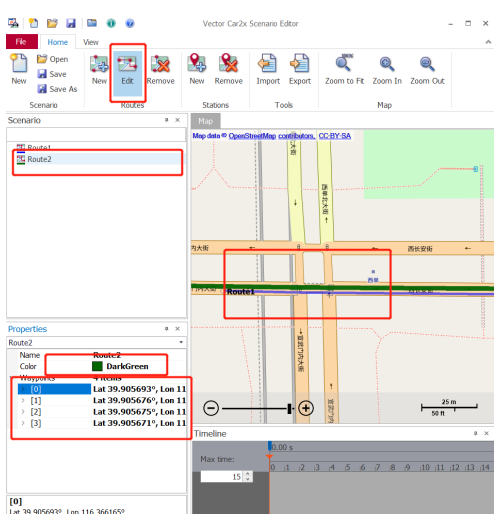
그림 11: 경로 편집
► 새로운 종방향 차량 경로를 추가하고 ICW 시나리오에서 HV의 경로에 맞게 편집합니다(그림 12).
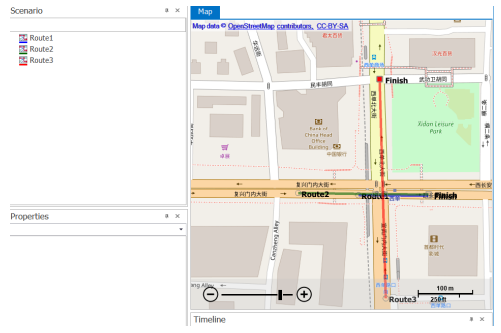
그림 12: 새 세로 경로 추가
► New Stations를 클릭하고 각 경로에 대해 1개의 차량 노드를 추가하고 CANoe 프로젝트의 각 차량 시뮬레이션 노드의 이름을 참조하여 색상과이름을 편집합니다. HV의 이름은 DUT, RV-1의 이름은 CarY, RV 2의 이름은 CarX입니다(그림 13, 그림 14).
새 메모도 데이터베이스에 구성되었습니다. 따라서 Car2x 네트워크 익스플로러를 사용해야 합니다. 시뮬레이션 설정의 메모는 데이터베이스 메모에 연결되어야 합니다(메모 | 구성 | 네트워크 노드를 마우스 오른쪽 버튼으로 클릭).
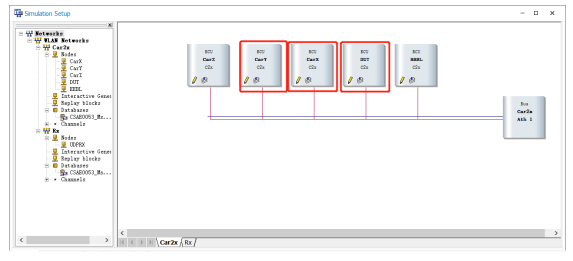
그림 13: 차량 시뮬레이션 노드
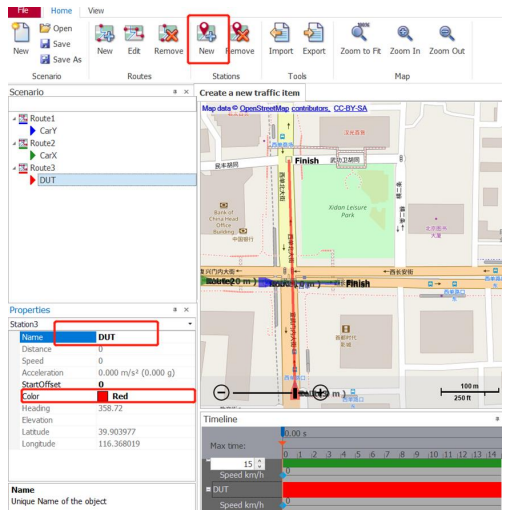
그림 14: 노드 이름 편집
► 정지된 차량을 시뮬레이션하도록 CarX(RV-2) 구성: 지도에서 CarX를 끌어 교차로에 배치하여 DUT(HV) 시선을 차단하고 타임라인 창에서 속도 매개변수를 0( 그림 15).
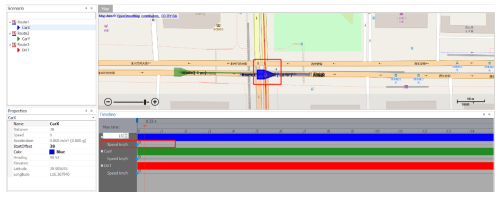
그림 15: 속도 매개변수 편집
► ICarX가 이벤트 데이터를 전송해야 하는 경우(다른 V2V 통신 시나리오 시뮬레이션의 경우) 타임라인 창에서 차량을 마우스 오른쪽 버튼으로 클릭하여 메시지 속성을 추가할 수 있습니다. 그림 16은 다음을 보여줍니다. 10초에 CarX는 경보 이벤트 메시지를 보냅니다.
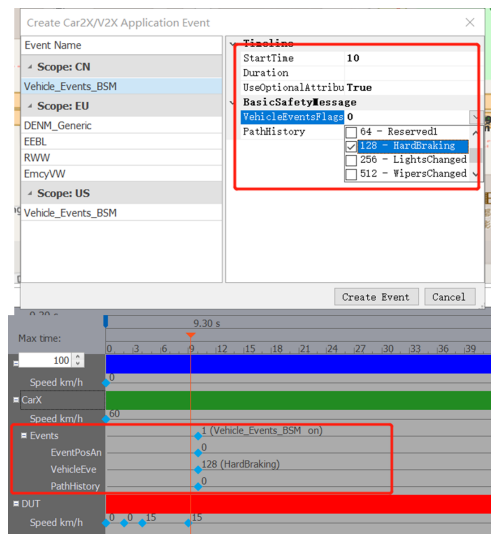
그림 16: 이벤트 매개변수 편집
► 지도의 교차점에서 DUT를 초기 위치로 드래그합니다. 타임라인 창에서: 차량 웨이포인트를 편집하여 HV의 시작을 시뮬레이션합니다. (0s- 0km/h;2s-0km/h;4s-15km/s,9s-15km/h) (그림 17).
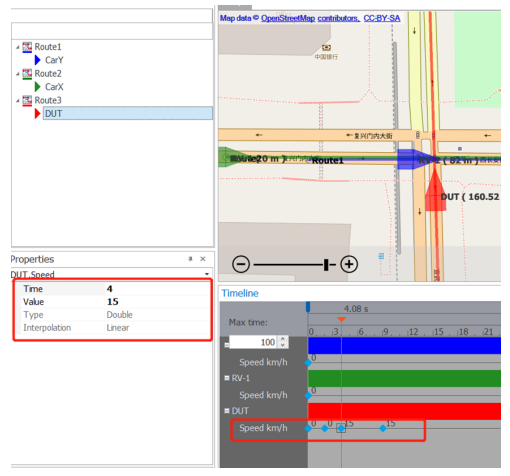
그림 17: HV 매개변수 편집
► 운전 차량을 시뮬레이션하기 위해 왼쪽 영역에서 CarY(RV-1)를 오른쪽으로 편집하면 초기 위치가 Route2의 시작점입니다. 타임라인 창에서 차량의 초기 속도는 60km/h로 설정되어 있습니다. 타임라인 커서를 밀어 각 차량의 상대적 위치를 확인합니다(그림 18).
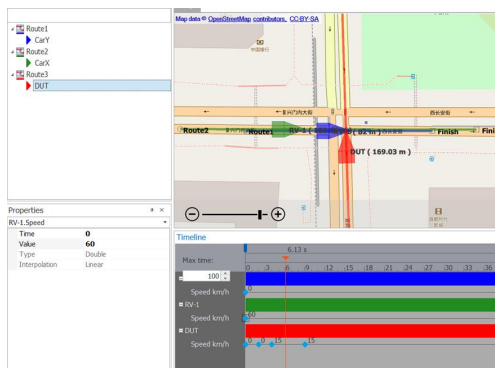
그림 18: RV-1 매개변수 편집
► 후속 시뮬레이션을 위해 장면 파일을 저장합니다. ICW 시나리오 파일(ICW Scenario(Temp).scn)은 이 애플리케이션 노트에 첨부되어 있습니다.
► CSAE53의 다른 시나리오는 이 가이드를 참조하거나 R&S 파트너인 Shanghai Polelink co., LTD에 문의하세요. 동시에 Polelink는 CarMaker + CANoe + R&S 기기를 기반으로 3D V2X 시나리오 시뮬레이션 컨설팅 서비스를 제공합니다.
4.3.1 GNSS Waypoint 파일 생성
► CANoe 소프트웨어를 사용하여 이 안내서에 첨부된 프로젝트를 열고 시나리오 관리자 도구를 열어 이전에 구성된 C-V2X 시나리오 파일을
가져옵니다: ICW Scenario (Temp).scn
(그림 19)
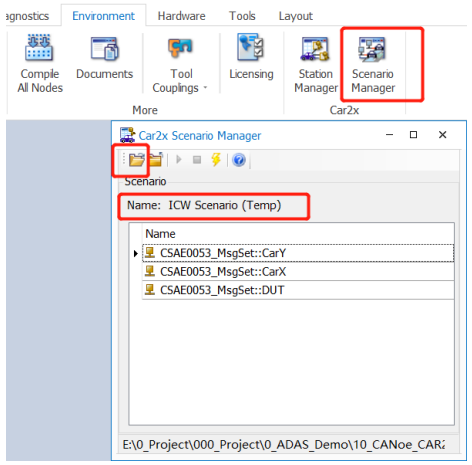
그림 19: 시나리오 파일의 V2X 가져오기
► CANoe 프로그램을 실행하고 Scenario 전면 패널을 엽니다. 예와 같이 GNSS 시뮬레이션의 시작 시간을 구성하십시오(그림 20).
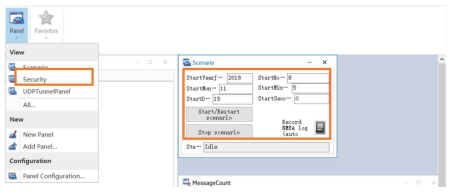
그림 20: GNSS 매개변수 구성
4.3.2 CMW500으로 시나리오 실행
► CANoe 소프트웨어로 프로젝트를 엽니다. Scenario Manager 도구를 시작하고 이전에 구성된 C-V2X 시나리오 파일을 가져옵니다. ICW Scenario (Temp).scn (그림 20)
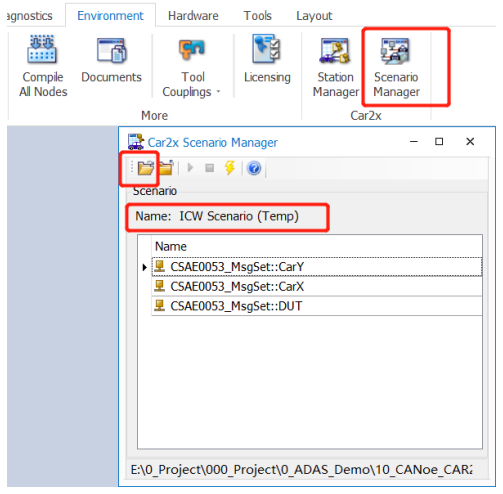
그림 21: V2X 시나리오 파일 가져오기
► CANoe 프로그램을 실행하고 Scenario 전면 패널을 열고 GNSS의 시작 시간을 구성합니다.
예(그림 22)와 같이 시뮬레이션.
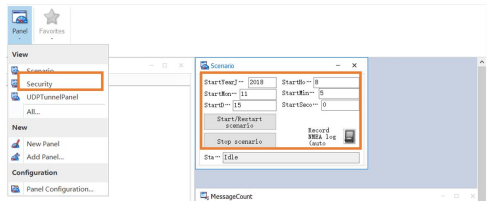
그림 22: 시나리오 시작
► Start Scenario 버튼을 클릭하고 CANoe와 CMW500 간의 통신이 완료될 때까지 기다립니다.
설정되었습니다(그림 23). DUT가 위성 동기화 정보를 수신하자마자 CANo에서 DUT가 보낸 해당 정보를 볼 수 있습니다.
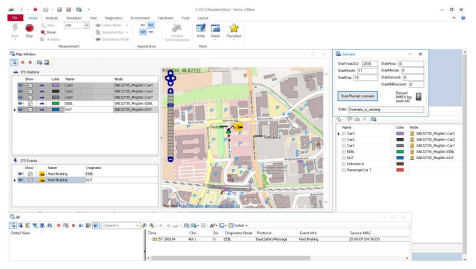
그림 23: 시뮬레이션 실행
► New Stations를 클릭하고 각 경로에 대해 1개의 차량 노드를 추가하고 CANoe 프로젝트의 각 차량 시뮬레이션 노드의 이름을 참조하여 색상과 이름을 편집합니다. HV의 이름은 DUT, RV-1의 이름은 CarY, RV 2의 이름은 CarX입니다(그림 13, 그림 14).
새 메모도 데이터베이스에 구성되었습니다. 따라서 Car2x 네트워크 익스플로러를 사용해야 합니다. 시뮬레이션 설정의 메모는 데이터베이스 메모에 연결되어야 합니다(메모 | 구성 | 네트워크 노드를 마우스 오른쪽 버튼으로 클릭).
5 요약
이 애플리케이션 노트에 제시된 테스트 솔루션을 사용하면 실험실에서 안전이 중요한 C-V2X 애플리케이션을 테스트할 수 있습니다.
신뢰할 수 있고 반복 가능한 결과를 제공합니다.
벡터 CANoe .Car2x 소프트웨어 도구는 로데슈바르즈 기기와 결합하여 복잡하고 재현 가능한 C V2X 시나리오를 생성하여 C-V2X 지원 TCU를
구성된 상황을 파악하고 구현된 기능을 목표 방식으로 테스트합니다.
테스트 솔루션은 미래에 대비한 투자이며, 향후 C-V2X 릴리스를 수용하기 위해 R&S®CMX500 Radio Communication Tester로 확장할 수 있는 옵션이 있습니다.
5G New Radio(5G NR)를 포함하여 C-V2X의 최신 개발에 발맞춥니다.
6 문헌
[1] R. Stuhlfauth, 백서: 자동차 애플리케이션을 위한 무선 통신, 로데슈바르즈, 2021년.
[2] 애플리케이션 카드: 실험실에서 안전이 중요한 셀룰러 V2X 애플리케이션의 시나리오 기반 테스트
환경, PD 3609.3059.92, 버전 01.01: Rohde & Schwarz, 2019.
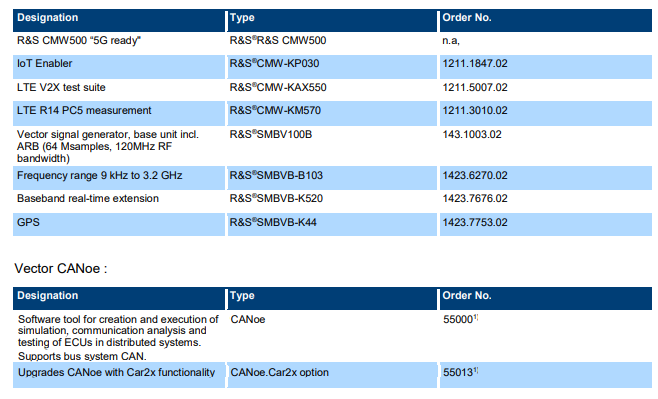
7 주문 정보
출처> 로데슈바르즈 홈페이지
추가 자료가 필요하시면 아래 연락처로 요청주시면 제공해 드릴 수 있도록 하겠습니다.
또한 렌탈 및 구매가 필요하신 분은 연락 주시면 빠르게 대응해 드릴 수 있도록 노력하겠습니다.
연락처 : 031-756-0890
E-mail : [email protected]
Website : www.rfmarket.co.kr
감사합니다.
#로데슈바르즈 #휴대용스펙트럼분석기 #스펙트럼분석기 #측정장비 #rohdeschwarz #오실로스코프 #VNA #NetworkAnalyzer #네트워크분석기 #신호발생기 #휴대용네트워크분석기 #파워공급기 #EMC #EMIreciever #5G #Wifi #lte #11ax #CMW500 #CMW100 #CMP180 #SMBV100B #SMW200A #FSV3030 #FSVA3040 #ZNB #ZNA #파워메터